-
Want a paper copy?
You can now buy the book!
All royalties go to the Cystic Fibrosis Trust.Spotted an error? Have comments?
Let us know!Get hands on with source code for the book.
1.4 Extending the model
Dr Bayes pulls out her trusty magnifying glass and continues her investigation of the crime scene. As she examines the floor near Mr Black’s body she discovers a hair lying on top of the pool of blood. “Aha” exclaims Dr Bayes “this hair must belong to someone who was in the room when the murder took place!” Looking more closely at the hair, Dr Bayes sees that it is not the lustrous red of Miss Auburn’s vibrant locks, nor indeed the jet black of the victim’s hair, but the distinguished silver of Major Grey!

Now that we are equipped with the concept of factor graphs, we can extend our model to incorporate this additional clue from the crime scene. The hair is powerful evidence indicating that Major Grey was present at the time of the murder, but there is also the possibility that the hair was stolen by Miss Auburn and planted at the crime scene to mislead our perceptive sleuth. As before, we can capture these thoughts quantitatively using a conditional probability distribution. Let us denote the new information by the random variable hair, which takes the value true if Major Grey’s hair is discovered at the scene of the crime, and false otherwise. Clearly the discovery of the hair points much more strongly to Grey than to Auburn, but it does not rule out Auburn completely.
Suppose we think there is a 50% chance that Grey would accidentally leave one of his hairs at the crime scene if he were the murderer, but that there is only a 5% chance that Auburn would think to plant a grey hair if she were the murderer. The conditional probability distribution would then be
As we have seen before, this is the conditional probability of hair being true given two different values of murderer, not a probability distribution over hair, and so the numbers in (1.32) do not have to add up to one.
In writing the conditional probability this way, we have actually made an additional assumption: that the probability of one of Major Grey’s hairs being found at the scene of the crime only depends on who committed the murder, and not anything else – including the choice of weapon that was used to commit the murder. This assumption has arisen because the conditional probability in (1.32) does not include weapon in the variables being conditioned on. Mathematically this assumption can be expressed as
which says that the distribution of hair is independent of the value of weapon once we have conditioned on the value of murderer. For this reason it is known as a conditional independence assumption. Notice that (1.33) has a similar form to the equations which hold when two variable are independent, e.g. (1.12), but has an additional conditioning variable on both sides.
The question to ask when considering a conditional independence assumption is “Does learning about one variable, tell me anything about the other variable, if I knew the value of the conditioning variable?”. In this case that would be “Does learning about the hair, tell me anything about the choice of weapon, if I already knew who the murderer was?”. Reasonably, the answer in this case might be that you could learn a little (for example, the dagger might mean the murderer had to get closer to the victim and so was more likely to drop a hair). However, for the sake of simplicity we assume that this conditional independence assumption holds.
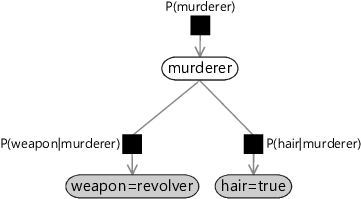
Figure 1.13 shows the factor graph corresponding to our expanded model with the new hair variable and a new factor representing this conditional distribution. Our conditional independence assumption has a simple graphical interpretation, namely that there is no edge connecting the weapon node directly to the factor representing the conditional distribution . The only way to get from the weapon node to the hair node is via the murderer node. We see that the missing edges in the factor graph capture independence assumptions built into the model.
|
There is an alternative graphical representation of a model called a Bayesian network or Bayes net that emphasises such independence assumptions, at the cost of hiding information about the factors. It provides less detail about the model than a factor graph, but gives a good ‘big picture’ view of which variables directly and indirectly affect each other. See Panel 1.2 for more details.
|
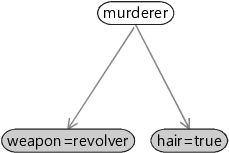
As this figure shows, by hiding the factors, a Bayes net emphasises which variables there are and how they influence each other (directly or indirectly). Bayes nets can be very useful in the early stages of model design when you want to focus on what variables to include and which will affect each other, without yet getting into details of precisely how they affect each other.
The disadvantage of using a Bayes net is that it is an incomplete specification of a model – you also have to write down all the factor functions externally to the graph and consider the two together as making up the model. For this reason, we have chosen to use factor graphs in this book, since they provide a stand-alone description of the model.
Given the factor graph of Figure 1.13, we can write down the joint distribution as the product of three terms, one for each factor in the factor graph:
Check for yourself that each term on the right of equation (1.34) corresponds to one of the factor nodes in Figure 1.13.
Incremental inference
We want to compute the posterior distribution over murderer in this new model, given values of weapon and hair. Given that we have the result from the previous model, we’d like to make use of it – rather than start again from scratch. To get our posterior distribution in the previous model, we conditioned on the value of weapon. To perform incremental inference in this new model, we can write down Bayes’ rule but condition each term on the variable weapon:
We can use exactly the same trick as we did back in equation (1.26) to drop the denominator and replace the equals sign with a proportional sign :
Remembering that hair and weapon are conditionally indepedent given murderer, we can use equation (1.33) and drop weapon from the last term:
Since we know the values of weapon and hair, we can write in these observations:
We can now compute the new posterior distribution for murderer. As before, each term depends only on the value of murderer and the overall normalization can be evaluated at the end. Substituting in the posterior we obtained in section 1.2 and our new conditional probability from equation (1.32) gives:
The sum of these two numbers is 0.347, and dividing both numbers by their sum we obtain the normalized posterior probabilities in the form
Taking account of all of the available evidence, the probability that Grey is the murderer is now 95%.
As a recap, we can plot how the probability distribution over murderer changed over the course of our murder investigation (Figure 1.14). Notice how the probability of Grey being the murderer started out low and increased as each new piece of evidence stacked against him. Similarly, notice how the probability of Auburn being the murderer evolved in exactly the opposite direction, due to the normalization constraint and the assumption that either one of the two suspects was the murderer. We could seek further evidence, in the hope that this would change the probability distribution to be even more confident (although, of course, evidence implicating Auburn would have the opposite effect). Instead, we will stop here – since 95% is greater than our threshold of 91% and so enough for a conviction!
 Excel
Excel CSV
CSV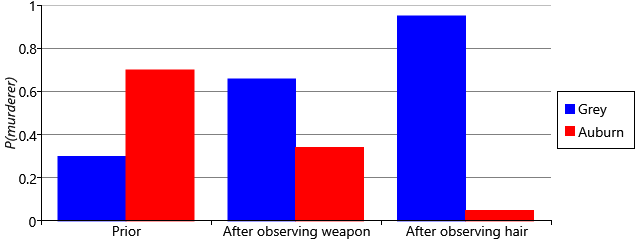
The model of the murder that we built up in this chapter contains various prior and conditional probabilities that we have set by hand. For real applications, however, we will usually have little idea of how to set such probability values and will instead need to learn them from data. In the next chapter we will see how such unknown probabilities can be expressed as random variables, whose values can be learned using the same probabilistic inference approach that we just used to solve a murder.
conditional independenceTwo variables A and B are conditionally independent given a third variable C, if learning about A tells us nothing about B (and vice-versa) in the situation where we know the value of C. Put another way, it means that the value of A does not directly depend on the value of B, but only indirectly via the value of C. If A is conditionally independent of B given C then this can be exploited to simplify its conditional probability like so:
For example, the knowledge that a big sporting event is happening nearby (B) might lead you to expect congestion on your commute (C), which might increase your belief that you will be late for work (A). However, if you listen to the radio and find out that there is no congestion (so now you know C), then the knowledge of the sporting event (B) no longer influences your belief in how late you will be (A). This also applies the other way around, so someone observing whether you were late (A), who had also learned that there was no congestion (C) would be none the wiser as to whether a sporting event was happening (B).
Bayesian networkA graphical model where nodes correspond to variables in the model and where edges show which variables directly influence each other. Factors are not shown, but the parent variables in a factor are connected directly to the child variable, using directed edges (arrows). See Panel 1.2.
For example, here is a Bayes net for the model of Chapter 1:
weapon=revolver
observed bool variable
The murder weapon used (either dagger or revolver).
hair=true
observed bool variable
Whether or not a grey hair is present at the crime scene.
murderer
bool variable
The identity of the murderer (either Grey or Auburn).
The following exercises will help embed the concepts you have learned in this section. It may help to refer back to the text or to the concept summary below.
- Continuing your chosen scenario from previous self assessments, choose an additional variable that is affected by the conditioning variable. For example, if the conditioning variable is ‘the traffic is bad’, then an affected variable might be ‘my boss is late for work’. Draw a factor graph for a larger model that includes this new variable, as well as the two previous variables. Define a conditional probability table for the new factor in the factor graph. Write down any conditional independence assumptions that you have made in choosing this model, along with a sentence justifying that choice of assumption.
- Assume that the new variable in your factor graph is observed to have some particular value of your choice (for example, ‘my boss is late for work’ is observed to be true). Infer the posterior probability of the conditioning variable (‘the traffic is bad’) taking into account both this new observation and the observation of the other conditioned variable used in previous self assessments (for example, the observation that I am late for work).
- Write a program to print out 1,000 joint samples of all three variables in your new model. Write down ahead of time how often you would expect to see each triplet of values and then verify that this approximately matches the fraction of samples given by your program. Now change the program to only print out those samples which are consistent with your both observations from the previous question (for example, samples where you are late for work AND your boss is late for work). What fraction of these samples have each possible triplet of values now? How does this compare to your answer to the previous question?
- Consider some other variables that might influence the three variables in your factor graph. For example, whether or not the traffic is bad might depend on whether it is raining, or whether there is an event happening nearby. Without writing down any conditional probabilities or specifying any factors, draw a Bayes net showing how the new variables influence your existing variables or each other. Each arrow in your Bayes net should mean that "the parent variable directly affects the child variable" or "the parent variable (partially) causes the child variable". If possible, present your Bayes network to someone else, and discuss it with them to see if they understand (and agree with) the assumptions you are making in terms of what variables to include in the model and what conditional independence assumptions you have made.
[Pearl, 1985] Pearl, J. (1985). Bayesian networks: A model of self-activated memory for evidential reasoning. In Proc. of Cognitive Science Society (CSS-7).
[Pearl, 1988] Pearl, J. (1988). Probabilistic Reasoning in Intelligent Systems. Morgan Kaufmann, San Francisco.